Tiago的半程马拉松冠军填补真空,Tiago打开了来源
- 编辑:admin -Tiago的半程马拉松冠军填补真空,Tiago打开了来源
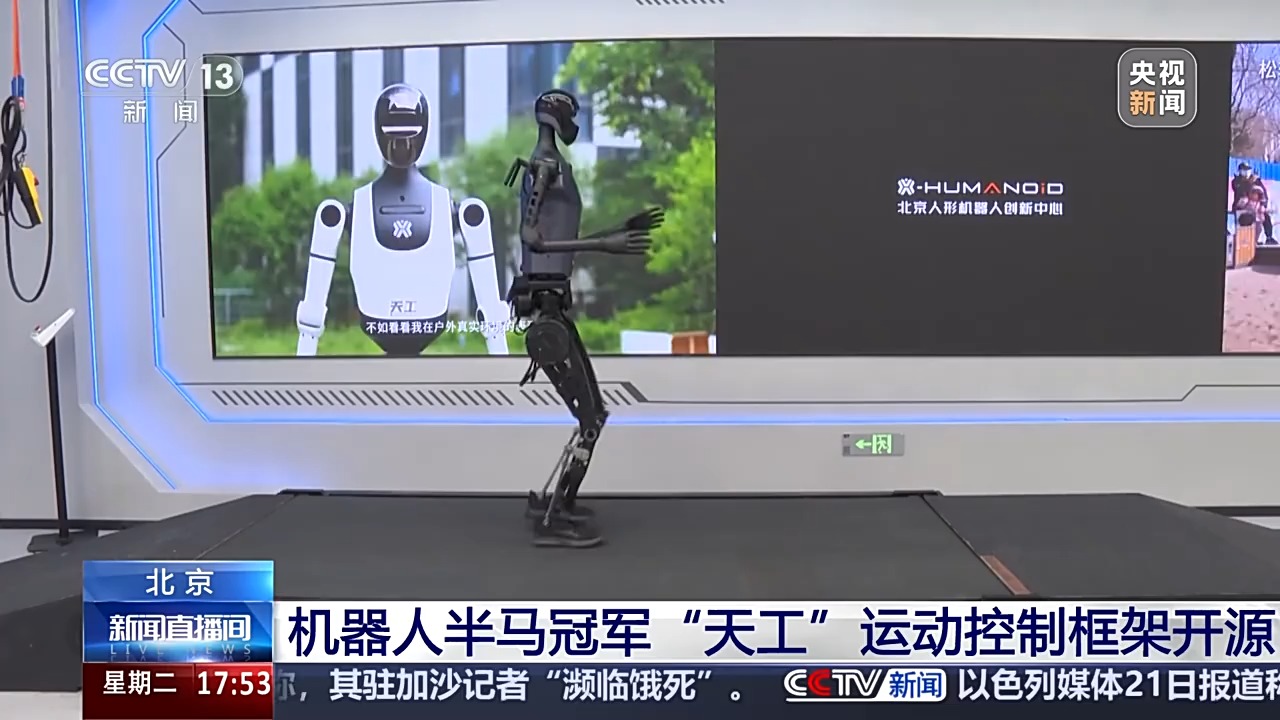 根据今天的闭路电视新闻,7月22日,他为半程马拉松机器人冠军天鹅(Tianggo)推出了操作和控制算法框架,并在开源场中高性能的人形机器人机器人的运动控制框架内填补了真空。运动控制能力是中央技术,它允许人形机器人适应其环境并执行任务。当机器人与物理世界(例如人类)相互作用时,必须控制每个关节以确保运动的稳定性和精度。人类运动控制需要小脑调节,而机器人运动控制则基于一组算法。 “天和超”类人机器人可以通过找到各种复杂的土地,例如楼梯,田径,草地,砾石,沙子等来实时行走。这是因为R&D人员在天气运动控制算法中引入了增强和模仿的学习机制。这介绍了移动控制算法以“天尾升”引入。它是由北京人形机器人中心独立开发的。为了面对复杂的地形,可以训练类人形机器人在短时间内适应和迅速移动,从而为人形机器人核提供了更基本的技术支持,从而在高复制环境中留下了实验室和执行任务。此外,北京人形创新中心同时开设了多个虚拟机器人培训领域,以支持完整的场景互动,包括客厅,客厅,厨房,超市,工厂和其他场景。研发人员通常会为在这些实际情况下执行多个操作任务的机器人收集真实的机器数据。但是,只有在实际情况下可以同时执行的有限数量的机器人。为了获得大规模智能数据的收集和培训,研发人员还创建了数字双胞胎模拟方案,机器人C在阶段使用。它可以自由操作所有项目。
根据今天的闭路电视新闻,7月22日,他为半程马拉松机器人冠军天鹅(Tianggo)推出了操作和控制算法框架,并在开源场中高性能的人形机器人机器人的运动控制框架内填补了真空。运动控制能力是中央技术,它允许人形机器人适应其环境并执行任务。当机器人与物理世界(例如人类)相互作用时,必须控制每个关节以确保运动的稳定性和精度。人类运动控制需要小脑调节,而机器人运动控制则基于一组算法。 “天和超”类人机器人可以通过找到各种复杂的土地,例如楼梯,田径,草地,砾石,沙子等来实时行走。这是因为R&D人员在天气运动控制算法中引入了增强和模仿的学习机制。这介绍了移动控制算法以“天尾升”引入。它是由北京人形机器人中心独立开发的。为了面对复杂的地形,可以训练类人形机器人在短时间内适应和迅速移动,从而为人形机器人核提供了更基本的技术支持,从而在高复制环境中留下了实验室和执行任务。此外,北京人形创新中心同时开设了多个虚拟机器人培训领域,以支持完整的场景互动,包括客厅,客厅,厨房,超市,工厂和其他场景。研发人员通常会为在这些实际情况下执行多个操作任务的机器人收集真实的机器数据。但是,只有在实际情况下可以同时执行的有限数量的机器人。为了获得大规模智能数据的收集和培训,研发人员还创建了数字双胞胎模拟方案,机器人C在阶段使用。它可以自由操作所有项目。

